The subject of how EV charging robot automation technology works is no longer simply an academic one. These devices are coming into parking garages and fleet depots right now, plugging in automobiles without anyone having to touch a cable.
And to be honest? When you think about it, that’s crazy.
Autonomous charging robots are a real change in the infrastructure for electric vehicles. The charger comes to the drivers instead of them looking for open ones. Also, this technology solves genuine problems, such making it easier for disabled drivers to get around, charging fleets overnight, and making the most of parking spaces. I’ve been following this space for years, and the speed at which businesses are using it has even astonished me.
But how could a robot really discover the charging port on your car, line itself up properly, and plug it in? The answer has to do with sensor fusion, precise actuators, and some very smart software. Here’s a list of all the layers.
How EV Charging Robot Automation Technology Works at the Hardware Level
Sensor Fusion and Positioning: The Brain Behind Autonomous Docking
Real-World Deployment Challenges and How Manufacturers Solve Them
The Software Stack: AI, Path Planning, and Fleet Orchestration
The Business Case: Why Autonomous Charging Makes Financial Sense
How EV Charging Robot Automation Technology Works at the Hardware Level
To understand how EV charging robot automation technology works, you need to know how the machine itself works. Most designs have the same basic structure, but how they are made might be very different from one manufacturer to the next.
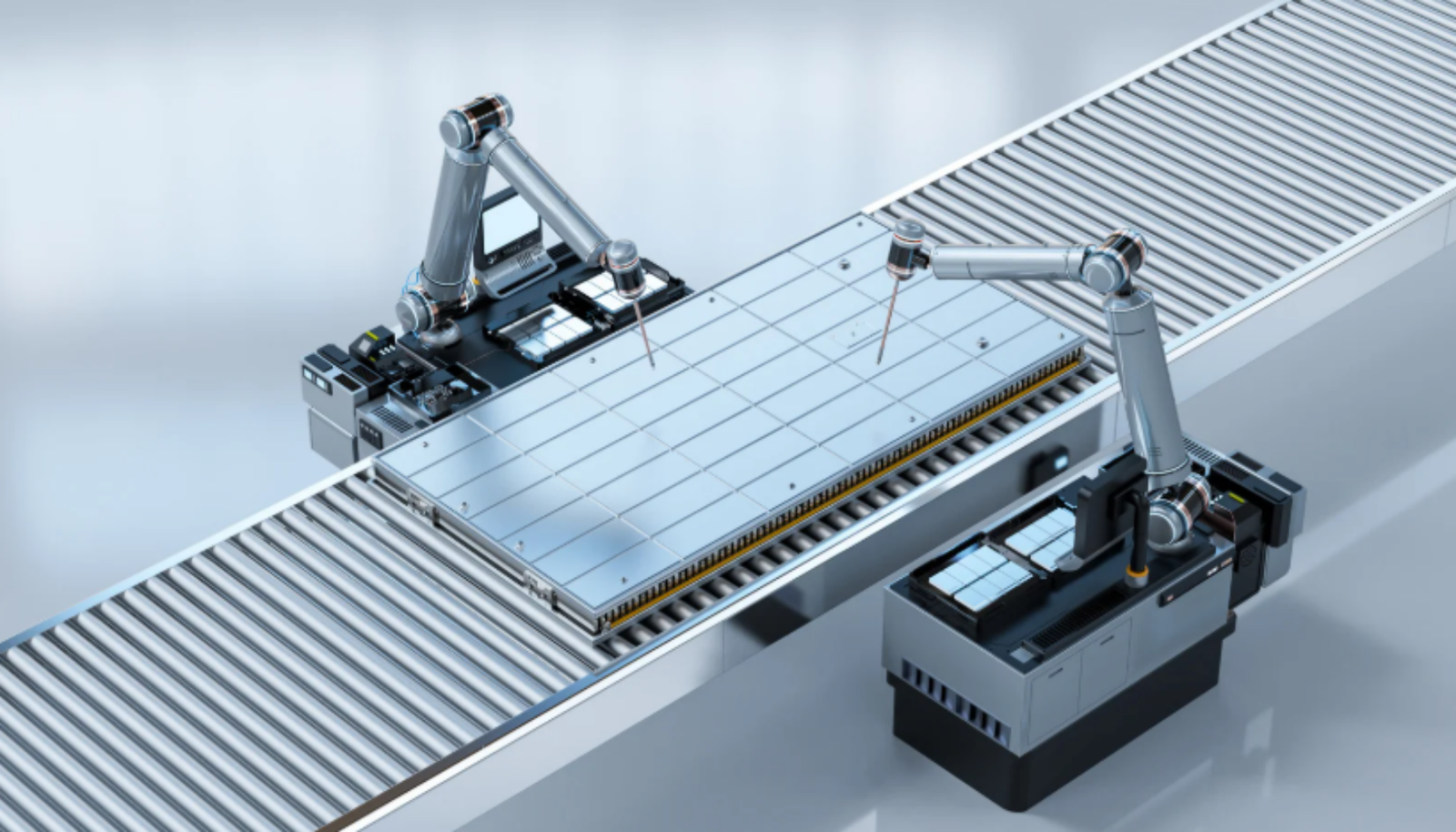
The mobile base is basically an autonomous mobile robot (AMR). It moves through parking structures on wheels or tracks. Companies like Volkswagen showed off early prototypes with rolling units that had batteries. In the meantime, companies like EV Safe Charge and Evar have released commercial versions. I’ve seen video of the VW prototype driving through a garage, and it does so with an almost alarming amount of confidence.x
The mobile base has a robotic arm on top of it that can usually move in six different ways. That means it can reach, twist, and angle the connector into almost any position on the charge port. In particular, these arms are very similar to industrial robots, which are the same kind of robots that work on factory assembly lines. When you see the arm in action up close, be warned: the pace is slower than you may think, but the precision is astounding.
The connector end-effector is the part that does the work. It has a standard CCS, CHAdeMO, or Type 2 plug, and some models employ a universal adaptor system. The gripper must exert the right amount of force—enough to hold the connector in place but not so much that it breaks the port. It sounds easy to make that balance, but it’s not.
Some important hardware parts are:
- LiDAR sensors for navigation and obstacle detection
- Depth cameras (often Intel RealSense or similar) for close-range alignment
- Force-torque sensors at the wrist joint for safe plug insertion
- Onboard battery pack to power the robot between docking stations
- Wireless communication module for fleet management integration
The hardware by itself isn’t that great. The software that controls the EV charging robot is what makes it really operate, and that’s where things get fascinating.
Sensor Fusion and Positioning: The Brain Behind Autonomous Docking
This is where the technology for automating EV charging robots gets interesting. A robot can’t just pull up and assume where the charge port is; it needs to be accurate to within a millimeter. So, these systems need different kinds of sensors to work together. It’s like the robot is using its eyes, hands, and memory all at once.
Simultaneous Localization and Mapping (SLAM) takes care of the large picture. The robot keeps track of where it is in the parking complex while making a map of it. Many teams use ROS (Robot Operating System) as a base for their SLAM programs. The robot knows where it is in relation to walls, columns, and parking slots. This is a lot harder to do in a concrete garage than it sounds because GPS doesn’t work well in certain places.
Computer vision takes care of figuring out what kind of vehicle it is. Cameras can tell the make, model, and direction of a car, while neural networks trained on thousands of pictures of cars can find the exact location of the charge outlet. Some systems also examine license plates to find the right billing request for a car. When I first looked at the specs, I was amazed to see that the plate-reading part works for both authentication and navigation.
During the last approach, close-range depth sensing takes over. Cameras that use structured light or time-of-flight produce a 3D point cloud of the region around the charge port. The robot’s software then compares this point cloud to known port shapes. In particular, it figures out the exact depth, angle, and position needed for insertion. We mean accuracy of less than 5mm.
The last layer is force feedback. Force-torque sensors pick up on resistance patterns when a plug is inserted. Too much force from the side? The arm moves. The connector clicks into place, and the robot says that docking was successful. This is like how you would feel the plug pop into place by hand, but it’s doing it without seeing it, using only sensor data.
The sensor fusion pipeline usually goes like this:
- Receive charging request with vehicle location data
- Move to the general parking area using SLAM
- Identify the target vehicle with computer vision
- Approach and localize the charge port with depth cameras
- Execute the docking motion with force-guided insertion
- Verify electrical connection and begin charging
- Monitor the session and undock when complete
But in the actual world, this is harder than it sounds. In parking garages, the lights change all the time and cars park at strange angles. Charge ports might be hidden by snow, debris, or aftermarket parts. So, reliable EV charging robot automation technology needs to be able to handle edge circumstances well, and edge cases are where most systems still have problems.
Real-World Deployment Challenges and How Manufacturers Solve Them
It’s one thing to know how EV charging robot automation technology works in a lab. Putting it in a crowded parking garage is a whole different story.
I’ve talked to engineers at two different robots companies about this, and the problems they talk about are worse than what you see in product demos.
Parking variability is the biggest headache. Drivers park crooked, too close to walls, or across lines instead of neatly in the middle. So, the robot needs a lot of reach and the ability to change its approach. Some systems fix this by making drivers park in painted guiding zones, while others just make their algorithms more flexible. The guide zone method works, but getting drivers to actually use it is a whole other issue.
Connector standardization remains a genuine obstacle. North America is moving toward the NACS (North American Charging Standard) because Tesla’s connector has become the SAE J3400 standard. Older cars, on the other hand, still use CCS1. Robots need to have more than one connector or employ adapter mechanisms, which makes them more complicated and more likely to break.
Safety certification is very important and not up for debate. These robots work near people and must follow ISO 10218 for industrial robot safety and new rules for collaborative robotics. They also have to deal with things that come up out of nowhere, like a youngster racing by or a shopping cart rolling into their path. You have to have emergency stop systems and collision-avoidance protocols. They’re the whole game.
Power management makes things difficult because they depend on each other. The robot relies on batteries and needs enough power to move, dock, and maybe even transfer electricity. Some designs come with their own battery packs that send power to cars. Some people connect a mobile cable management system to fixed electricity lines. The battery-carrying method slows down charging speed, but it lets you charge anywhere, usually up to 22 kW, which is fine for overnight charging but not enough for a quick lunchtime top-up.
Communication protocols tie everything together. The robot needs to be able to talk to the car, the building management system, and the cloud platform. OCPP (Open Charge Point Protocol), is what lets chargers talk to the network. ISO 15118 also lets the car and charger authenticate each other when they are plugged in. The robot acts as a mobile OCPP-compliant charge point. It’s a surprisingly well-designed piece of protocol.
This is how the main methods stack up:
| Feature | Battery-Carrying Robot | Cable-Tethered Robot | Fixed Robotic Arm |
|---|---|---|---|
| Mobility | Fully mobile | Limited range | Stationary |
| Charging speed | Slower (typically 7–22 kW) | Fast (up to 150 kW+) | Fast (up to 300 kW+) |
| Infrastructure cost | Lower initial cost | Moderate | Higher initial cost |
| Vehicles served per unit | Multiple, sequentially | Multiple within range | One at a time |
| Best use case | Fleet depots, airports | Parking garages | Dedicated charging hubs |
| Navigation complexity | High | Medium | Low |
| Example | VW mobile charger concept | Evar robot | Rocsys automated connector |
Each method has its own pros and cons when it comes to EV charging robot automation technology, and the best one for you will depend on where you plan to use it. There isn’t a clear winner here, but sellers won’t always tell you that.
The Software Stack: AI, Path Planning, and Fleet Orchestration

There are many layers to the software that runs the equipment that automates EV charging robots. This is the section that really sets the serious gamers apart from the demo-ware.
Perception software turns raw sensor data into valuable information. Convolutional neural networks (CNNs) can find objects like cars, charge ports, people, and other things that get in the way. These models learn from big amounts of parking data. They also need to execute in real time on edge computing hardware that is built into the robot. NVIDIA Jetson modules are a common choice for this kind of work. The real test is whether these models will perform well at 2am in a dark garage, not just when everything is perfect.
Path planning algorithms tell the robot where to go. A* and RRT (Rapidly-exploring Random Trees) algorithms find pathways that don’t hit anything in crowded parking lots. The planner keeps getting better as more sensor data comes in. In particular, the robot changes its route several times each second to avoid things that are in its way. A lot of math is going on behind the scenes while the robot moves toward your Tesla.
Motion control software turns planned pathways into commands for motors. PID controllers and more powerful model predictive control (MPC) algorithms make sure that movement is smooth and accurate. The robotic arm employs inverse kinematics to figure out the exact angles of the joints needed to move the connector to the right place. This math runs a lot of times every second. (And yes, it really is as cool as it sounds.)
Fleet orchestration controls many robots in a building. The orchestration layer takes care of:
- Task assignment — which robot charges which vehicle
- Queue management — prioritizing vehicles by departure time or state of charge
- Traffic coordination — preventing robots from colliding with each other
- Energy optimization — scheduling charging sessions to cut peak demand costs
- Predictive maintenance — flagging robots that need servicing before they fail
In the same way, the cloud platform lets you monitor and analyze things from afar. Dashboards let facility managers keep track of how often robots are used, how much energy they use, and how many times they charge. Amazon Web Services and other similar platforms often provide as the backbone for these systems’ IoT. It’s basically a logistics platform that also connects cars.
Machine learning improves performance over time. Every time you try to dock, it makes data. Successful connections make good approach tactics stronger, whereas failed attempts lead to analysis and model retraining. So, the longer robots work, the better they get at dealing with tough situations. This loop of constant development is at the heart of how EV charging robot automation technology grows in real life. It’s also why first-mover deployments, even if they’re not perfect, are so important in terms of competition.
The Business Case: Why Autonomous Charging Makes Financial Sense
Look, it’s important to know how EV charging robot automation technology works since the economics are really interesting. There’s a real bottom line reason for this technology, not just because it’s cool.
The main value proposition is based on space efficiency. Traditional charging stations need parking spaces that are set aside for them and have stationary equipment. One charging robot can move between cars and serve 8 to 12 parking slots. So, people that run parking garages don’t give up areas that may make money to put in chargers. In a garage in the city that charges $40 per place per day, such math adds up quickly.
Lower installation costs are quite important. It costs between $15,000 and $50,000 to run high-voltage wiring through a concrete parking structure for each recharge station. Robots don’t need as many fixed power drops, and a single power station may power a whole floor with mobile robots. Also, it is much easier to add features to existing buildings, since most parking structures in the U.S. are already built.
Over time, savings on labor add up. Fleet operators now pay people to plug in cars overnight, but self-driving robots would eliminate this cost completely. Also, they work around the clock without breaks, overtime, or having to deal with scheduling problems. Fleet managers I’ve talked to say that for mid-sized EV fleets, they spend between $80,000 and $120,000 a year only on charging labor.
Accessibility compliance is useful for following the rules. The Americans with Disabilities Act says that charging stations must be easy to get to. Because robots come to the car, they make it easier for people with disabilities to operate the car by design. The driver never has to deal with heavy cables or move charging equipment around. From a compliance point of view, that’s a no-brainer.
Grid optimization makes things better for utilities. Smart orchestration software can move charging loads to times when they are less busy. Charging automobiles one at a time instead of all at once lowers peak demand charges. As a result, the people that run the facilities pay less for electricity. The U.S. Department of Energy says that managed charging is important for keeping the grid stable. Interestingly, robotic systems are better at managed charging than fixed chargers with people who are impatient.
The total cost of ownership assessment is becoming more and more in favor of robotic solutions for facilities with more than 50 electric vehicles. Even while the cost of a robot up front is still significant (usually between $50,000 and $150,000), the savings on infrastructure and the increased efficiency of operations mean that the robots pay for themselves in 3 to 5 years in places where they are used a lot. Be warned: the payback window is based on high utilization rates. A garage that is just half full changes the math a lot.
Conclusion
How EV charging robot automation technology works is a well-planned combination of hardware, sensors, AI, and fleet software. These devices use LiDAR navigation, computer vision, force-guided docking, and intelligent orchestration to charge themselves reliably. I think the software stack is the more amazing feat, not the hardware.
The technology is genuine and in use right now. It is getting better quickly thanks to machine learning and lower costs for parts. As more people buy electric vehicles and parking companies hunt for better ways to charge them, the business argument gets stronger. The unit economics are getting better.
If you’re looking into EV charging robot automation technologies, here are some things you can do next:
- For facility managers: Request pilot proposals from vendors like Rocsys, Evar, or EV Safe Charge. Start with a small deployment to test performance in your specific environment.
- For fleet operators: Calculate your current per-vehicle charging labor costs. Compare against robotic solutions for overnight depot charging.
- For technology professionals: Explore the ROS ecosystem and OCPP standards. The intersection of robotics and EV charging offers growing career opportunities.
- For investors: Watch for companies achieving consistent sub-30-second docking times. That’s the threshold where EV charging robot automation technology becomes truly competitive with human-operated charging.
There won’t be an autonomous charging transition. It’s already here, and knowing how it works will help you make better choices regarding infrastructure, investment, and adoption.
FAQ

What is an EV charging robot, and how does it work?
An EV charging robot is an autonomous mobile machine that moves to a parked electric vehicle, finds the charge port, and plugs in a connector without human help. It uses LiDAR for navigation, cameras for vehicle identification, and depth sensors for precise connector alignment. EV charging robot automation technology combines these sensor inputs through fusion algorithms to achieve millimeter-level docking accuracy.
How accurate does the robot need to be for successful docking?
The robot typically needs positioning accuracy within 2–5 millimeters for reliable connector insertion. Force-torque sensors at the robotic arm’s wrist provide final guidance during the last few centimeters. Specifically, the system detects resistance patterns to confirm proper seating. If alignment is off, the arm automatically adjusts before applying insertion force.
Can EV charging robots work with all electric vehicle models?
Most robots are designed to work with standard connector types — CCS1, CCS2, NACS (J3400), and CHAdeMO. However, charge port locations vary significantly between vehicle models. The robot’s computer vision system must recognize each model and know where its port is located. Some vehicles with unusual port positions or protective flaps may need additional software training. Nevertheless, major manufacturers are expanding vehicle compatibility continuously.
How fast can a charging robot charge an EV compared to a regular charger?
Charging speed depends on the robot’s design. Battery-carrying robots typically deliver 7–22 kW (Level 2 speeds), while cable-tethered and fixed robotic arm systems can deliver 50–350 kW DC fast charging. The robot itself doesn’t limit charging speed — the power delivery system does. Consequently, a robotic arm connected to high-power infrastructure charges just as fast as a traditional DC fast charger.
Are EV charging robots safe to use in public parking garages?
Yes, when properly certified. These robots include multiple safety systems including emergency stops, collision avoidance, and speed limiting near pedestrians. They must comply with ISO 10218 robot safety standards and local building codes. Additionally, most designs move at slow speeds (under 1 meter per second) and use bumper sensors to detect unexpected contact. The force applied during connector insertion is carefully controlled to prevent vehicle damage.
How much does it cost to deploy EV charging robots?
Individual robots currently cost between $50,000 and $150,000 depending on capabilities and charging power. However, total deployment costs are often lower than installing equivalent numbers of fixed charging stations. You’ll save on electrical infrastructure, trenching, and dedicated parking space allocation. For facilities charging 50+ vehicles daily, the payback period for EV charging robot automation technology typically ranges from 3 to 5 years. Costs are expected to drop as production scales up.
References
Keep reading
Here are the latest posts from the blog.

Most teams don’t realize how important it is to select the appropriate version control tool until it’s too late. A comprehensive comparison of software configuration manageme…

For years, design teams have struggled with the same excruciating handoff issue. Designers create stunning mockups, developers look at them blankly, context disappears, and b…
GPU memory has been the bottleneck that no one could escape for years. The models continued becoming larger. The hardware was failing to keep up. The gap just kept growing. N…