Sim real transfer how robots learn walk is one of the most important breakthroughs in modern robotics — and honestly, it’s one of those ideas that sounds obvious in hindsight but took years of hard-won research to actually work. Instead of gambling expensive hardware on trial-and-error experiments, engineers now train robots entirely inside virtual worlds. The robot falls thousands of times in simulation and never strips a single gear.
This approach has fundamentally changed how companies like Boston Dynamics and Unitree develop walking machines. Consequently, development timelines have shrunk from years to months, and cost curves have dropped dramatically. But here’s the thing: the real magic isn’t just running a simulation — it’s getting those virtual lessons to stick on physical hardware. That’s the hard part. And that’s exactly what we’re digging into here.
Why Robots Learn to Walk in Simulation First
The Physics Engines Powering Sim-to-Real Transfer
Domain Randomization and the Reality Gap
Case Studies: Boston Dynamics and Unitree in Practice
Reinforcement Learning: The Training Algorithm Behind Robot Walking
Why Robots Learn to Walk in Simulation First
Physical robots are expensive. Full stop.
A single Unitree H1 humanoid runs tens of thousands of dollars, and Boston Dynamics’ Atlas platform costs considerably more. Every crash, stumble, and tumble risks damaging motors, sensors, and structural components that aren’t cheap to replace.
Simulation eliminates that risk entirely. A virtual robot can attempt millions of walking gaits overnight. It can fall off cliffs, trip over obstacles, tumble down stairs — all without consequence. Furthermore, simulation runs faster than real time. What would take months of physical testing finishes in hours on a GPU cluster. I’ve watched teams iterate through a week’s worth of gait experiments before lunch.
Specifically, the process works like this:
- Build a virtual model of the robot using CAD data and measured physical properties
- Define a reward function that encourages stable, efficient walking
- Run reinforcement learning across thousands of parallel environments
- Transfer the trained policy onto the physical robot’s onboard computer
- Fine-tune in the real world to close any remaining performance gaps
This pipeline is why sim real transfer how robots learn walk has become the default approach across serious robotics teams. Notably, it isn’t limited to walking — teams use the same method for grasping, flying, and even surgical robotics tasks.
The economics are genuinely compelling. Training in simulation costs pennies per attempt. Training on hardware can cost hundreds of dollars per failure. Moreover, simulation lets engineers test dangerous scenarios — icy surfaces, high winds, uneven rubble — without any safety concerns whatsoever.
OpenAI’s research on sim-to-real transfer demonstrated this principle in a way that turned heads. A robotic hand learned to solve a Rubik’s Cube entirely in simulation before successfully performing the task on physical hardware. That result surprised a lot of people in the field when it dropped.
The Physics Engines Powering Sim-to-Real Transfer
Not all simulations are created equal — and this is where a lot of teams quietly lose months of progress.
The quality of sim real transfer how robots learn walk depends heavily on the physics engine underneath. A poor simulator produces policies that fail immediately on real hardware. A good one produces policies that work almost out of the box. The difference is enormous in practice.
Here’s how the major physics engines compare:
| Physics Engine | Developer | Key Strength | Common Use Case | Speed (Steps/Sec) |
|---|---|---|---|---|
| MuJoCo | DeepMind | Contact accuracy | Legged locomotion | ~10M |
| Isaac Sim | NVIDIA | GPU parallelism | Large-scale training | ~50M+ |
| PyBullet | Erwin Coumans | Open source, accessible | Research prototyping | ~1M |
| Drake | Toyota Research | Mathematical rigor | Manipulation tasks | ~500K |
| Gazebo | Open Robotics | ROS integration | Full system testing | ~100K |
MuJoCo (Multi-Joint Dynamics with Contact) has become the gold standard for locomotion research. DeepMind acquired and open-sourced it in 2022, which was a genuinely big deal for the community — suddenly the best contact dynamics engine in the field was free. Therefore, policies trained in MuJoCo tend to transfer well to real walking robots, which is why you see it cited in basically every serious locomotion paper.
NVIDIA’s Isaac Sim takes a different approach entirely. Because it uses GPU acceleration, it runs thousands of environments simultaneously. Consequently, training that might take days in MuJoCo finishes in hours on Isaac Sim. Additionally, Isaac Sim includes photorealistic rendering for vision-based tasks, which matters more as robots start relying on cameras.
Nevertheless, no physics engine perfectly replicates reality. There’s always a gap — specifically called the sim-to-real gap — and closing it is the central challenge of the entire field. Fair warning: underestimating this gap is how projects go sideways.
The gap shows up in several specific, frustrating ways:
- Contact dynamics — real floors have friction variations that simulators only approximate
- Motor behavior — physical motors have backlash, heat buildup, and response delays that are genuinely hard to model
- Sensor noise — real IMUs and encoders produce noisy, imperfect readings, nothing like the clean simulation data
- Unmodeled dynamics — cable routing, air resistance, and joint flexibility all affect real robots in ways the simulator ignores
Understanding these gaps isn’t just academic. They explain exactly why sim real transfer how robots learn walk requires more than just a good simulator and some patience.
Domain Randomization and the Reality Gap
Domain randomization is, in my opinion, the single most elegant technique in this entire field. The idea is almost counterintuitively simple.
Rather than making your simulation perfectly match reality, you make it randomly vary across a huge range of conditions. Because the robot learns to walk despite constantly changing friction, mass, motor delays, and terrain roughness, it develops a policy that doesn’t depend on any specific set of conditions. Consequently, when it hits the unpredictable real world, it handles things without falling apart.
Specifically, engineers randomize these parameters during training:
- Friction coefficients — varied between 0.2 and 1.5 across different surfaces
- Robot mass — shifted by ±10–15% to account for manufacturing tolerances
- Motor strength — scaled randomly to simulate wear and voltage fluctuations
- Terrain height maps — procedurally generated with bumps, slopes, and gaps
- Sensor latency — delayed by random milliseconds to mimic real communication delays
- External forces — random pushes applied to simulate wind or collisions
This technique was pioneered by OpenAI and further developed by researchers at UC Berkeley. Although it sounds backwards — adding noise to improve performance — the intuition holds up. Similarly, athletes who train in varied, unpredictable conditions consistently outperform those who only practice in ideal settings. Same principle, different domain.
System identification offers an alternative approach. Instead of randomizing everything, engineers carefully measure the real robot’s properties and tune the simulator to match those exact numbers. However, this approach is brittle — any change to the robot, like a new battery, worn gears, or different floor material, can break the calibration entirely. I’ve seen teams burn weeks chasing down calibration drift.
The best teams combine both methods. They use system identification to get the simulator roughly correct, then layer domain randomization on top. This combination is notably why modern sim real transfer how robots learn walk pipelines achieve such impressive real-world results.
Curriculum learning adds yet another layer. Rather than throwing the robot into the hardest scenarios from day one, training starts easy. The robot first learns to stand, then walks on flat ground, and gradually faces rougher terrain, stronger pushes, and more extreme conditions. This progressive difficulty mirrors how humans learn to walk as children — and it works for roughly the same reasons.
Case Studies: Boston Dynamics and Unitree in Practice
Theory is important. But real-world results tell the real story of sim real transfer how robots learn walk, and these two companies are worth studying closely.
Boston Dynamics and Atlas
Boston Dynamics built their reputation on model-based control — hand-tuned algorithms grounded in classical physics equations. However, their newer electric Atlas platform increasingly incorporates learning-based approaches. The company now uses simulation extensively to test locomotion policies before deploying them on hardware.
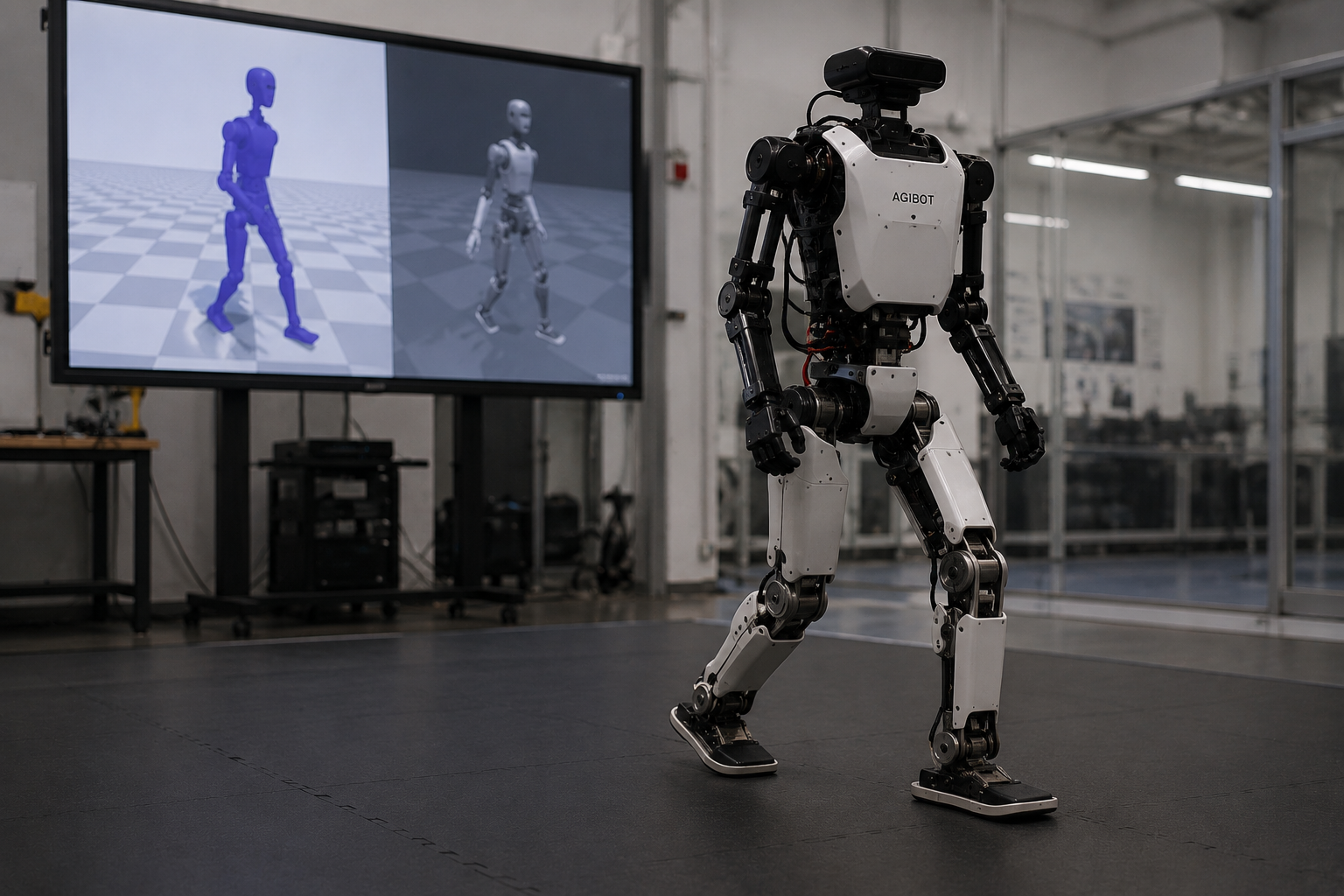
Their approach combines classical control with learned components. Importantly, the simulation pipeline lets them iterate rapidly on new behaviors. Parkour sequences too dangerous to develop directly on hardware get prototyped virtually first — the robot practices thousands of backflips in simulation before attempting one in the lab. That’s not a metaphor. That’s literally how they do it.
Boston Dynamics uses custom physics engines tuned to their specific hardware. Additionally, they maintain detailed digital twins of each individual robot, capturing manufacturing variations unit by unit. Therefore, policies transfer more cleanly to specific physical machines rather than relying on a generic model.
Unitree’s Rapid Rise
Unitree Robotics has taken a more aggressive simulation-first approach — and the results speak for themselves. Their Go2 quadruped and H1 humanoid both rely heavily on reinforcement learning policies trained in simulation.
Unitree’s strategy is particularly notable for several reasons:
- Massive parallelism — they run tens of thousands of simulation instances simultaneously
- Rapid iteration — new walking gaits go from concept to hardware test in days, not months
- Cost efficiency — simulation-heavy development keeps their robots genuinely affordable
- Open research — they’ve published papers detailing their sim-to-real pipelines, which the community appreciates
The Unitree Go2 handles rocky terrain, climbs stairs, and recovers from kicks — all behaviors first learned in simulation. Moreover, the company’s aggressive pricing (the Go2 starts under $2,000) is partly possible because simulation dramatically reduces physical testing costs. That’s the real kicker: better robots, cheaper, faster.
Key Lessons From Both Companies
Although Boston Dynamics and Unitree take meaningfully different approaches, common patterns emerge:
- Both invest heavily in accurate robot models for simulation
- Both use domain randomization to improve transfer robustness
- Both maintain rapid feedback loops between simulation and hardware testing
- Both combine learned policies with safety-critical classical controllers
These case studies prove that sim real transfer how robots learn walk isn’t just academic research anymore. It’s a production-ready engineering method, and it’s driving the entire robotics industry forward right now.
Reinforcement Learning: The Training Algorithm Behind Robot Walking
The algorithm that actually teaches robots to walk is reinforcement learning (RL). Think of it like training a dog — good behavior gets a treat, bad behavior gets nothing, and over time the robot figures out what actually works.
Specifically, the RL process for locomotion involves these components:
- State — the robot’s current joint angles, velocities, body orientation, and foot contacts
- Action — the torque commands sent to each motor at every control step
- Reward — a numerical score based on forward speed, energy efficiency, and stability
- Policy — the neural network that maps states to actions
The reward function is critical, and it’s honestly where a lot of the craft lives. A poorly designed reward produces bizarre, almost comedic walking gaits. Engineers spend significant time crafting rewards that encourage natural, efficient movement — and getting it wrong can waste weeks of training time.
A typical locomotion reward function includes:
- Forward velocity reward — move forward at the target speed
- Energy penalty — don’t waste motor power on jerky movements
- Stability bonus — keep the torso upright and smooth
- Foot clearance reward — lift feet high enough to avoid tripping
- Symmetry bonus — encourage left-right symmetry in the gait
Proximal Policy Optimization (PPO) is the most common algorithm for training walking policies. Developed by OpenAI, PPO strikes a practical balance between training stability and sample efficiency. Meanwhile, newer algorithms like SAC (Soft Actor-Critic) offer compelling alternatives for certain scenarios, and the field is moving fast.
Training typically runs on GPU clusters. A single walking policy might require 500 million to 2 billion simulation steps. Nevertheless, with modern hardware and parallel environments, this training completes in hours rather than weeks. This surprised me the first time I saw it — the scale of compute involved is staggering, but the wall-clock time is shockingly short.
The trained policy is surprisingly small. Most locomotion neural networks carry only a few thousand parameters and run comfortably on the robot’s onboard computer at 50–500 Hz control frequencies. This efficiency is exactly why sim real transfer how robots learn walk works so well in practice — the learned controller is lightweight, fast, and doesn’t need a data center on its back.
Importantly, the policy must handle situations it never explicitly trained on. A robot walking outdoors encounters endless variations in terrain, lighting, and disturbances. Domain randomization during training ensures the policy generalizes. Nevertheless, engineers also add safety layers — classical controllers that override the learned policy if the robot approaches dangerous states like extreme tilt angles. No-brainer addition, honestly.
Validation Challenges and the Future of Sim Real Transfer
Getting a robot to walk in simulation is the easy part.
Validating that it walks safely and reliably in the real world is where things get genuinely hard. This validation challenge sits at the frontier of sim real transfer how robots learn walk research, and it doesn’t get talked about enough outside of engineering teams.
Common failure modes during transfer include:
- The robot walks perfectly on lab floors but stumbles the moment it hits carpet
- Learned gaits work at room temperature but fail in cold weather when motors stiffen
- Policies trained with perfect state estimation degrade badly with noisy real sensors
- Battery voltage drops during a long walk, changing motor response characteristics mid-session
Engineers address these failures through structured validation protocols. Typically, they follow a careful progression:
- Tethered testing — the robot walks while suspended from a safety harness
- Controlled indoor testing — flat floors, then mats, then obstacles
- Semi-structured outdoor testing — sidewalks, grass, and gentle slopes
- Unstructured field testing — rough terrain, weather exposure, and long-duration walks
Additionally, the IEEE Robotics and Automation Society is developing standardized benchmarks for locomotion performance. These benchmarks will help the industry compare approaches consistently — which is badly needed right now, because comparing results across papers is currently a mess.
Several trends will shape the future of this field:
- Foundation models for robotics — large pretrained models that transfer across different robot bodies
- Digital twin refinement — continuously updating simulations with real-world data in a feedback loop
- Hybrid sim-real training — combining simulated and real experience during the training process itself
- Multi-modal learning — robots that use vision, touch, and proprioception together, not just joint angles
The cost implications are significant. As simulation tools improve, the barrier to developing walking robots drops further. Consequently, more companies will enter the market, prices will keep falling, and robots that walk reliably in unstructured real-world environments will become increasingly common. We’re already seeing early signs of that shift.
Conclusion
Sim real transfer how robots learn walk has fundamentally changed how robotics engineering gets done. Rather than running expensive, dangerous physical experiments, engineers now train robots in virtual worlds and carry those lessons into hardware. Domain randomization bridges the gap between simulation and reality. Physics engines like MuJoCo and Isaac Sim provide the foundation. And reinforcement learning algorithms like PPO teach the actual walking behavior.
The case studies from Boston Dynamics and Unitree prove this approach works at production scale. Moreover, it cuts development costs, speeds up timelines, and enables behaviors that would simply be too risky to develop on physical hardware alone.
If you’re interested in exploring this field, here are specific next steps you can take today:
- Start with MuJoCo — it’s free, well-documented, and the industry standard for locomotion research
- Learn PPO — Stable Baselines3 provides solid Python implementations that are genuinely beginner-friendly
- Study domain randomization — read the original papers and experiment with parameter ranges yourself
- Follow open-source projects — Unitree and the legged robotics community on GitHub share real code regularly
- Build intuition first — run simple simulations before attempting complex humanoid locomotion
The gap between simulation and reality is shrinking every year. Bottom line: sim real transfer how robots learn walk isn’t a research curiosity anymore. It’s the standard playbook for building the next generation of walking machines — and it’s worth understanding whether you’re building them or just watching them change the world.
FAQ
What is sim-to-real transfer in robotics?
Sim-to-real transfer is the process of training a robot’s control policy inside a simulated environment and then deploying that policy on physical hardware. The robot learns behaviors like walking, grasping, or handling terrain entirely in a virtual world. Consequently, it can perform those behaviors in the real world without extensive physical training. This is the core idea behind sim real transfer how robots learn walk.
Why can’t robots just learn to walk on real hardware?
Physical training is slow, expensive, and dangerous. A robot might need millions of attempts to learn a stable gait, and each fall risks damaging motors, sensors, and structural components worth thousands of dollars. Furthermore, real-time training is limited by physics — you can’t speed up time. Simulation solves all three problems at once.
What is domain randomization and why does it matter?
Domain randomization involves randomly varying simulation parameters like friction, mass, motor strength, and terrain during training. Although this adds noise to the learning process, it forces the robot to develop solid policies. Because these policies don’t rely on any specific set of conditions, they therefore transfer more reliably to the unpredictable real world.
Which physics engine is best for training walking robots?
MuJoCo is currently the most popular choice for locomotion research, offering accurate contact dynamics and efficient performance. However, NVIDIA Isaac Sim is gaining ground due to its massive GPU parallelism. The best choice depends on your specific needs. Notably, many teams use multiple engines — one for rapid prototyping and another for final validation.
How long does it take to train a robot to walk in simulation?
Training time varies significantly based on the robot’s complexity and available compute. A simple quadruped policy might train in 2–4 hours on a modern GPU, whereas a complex humanoid policy could take 12–48 hours. Additionally, engineers typically run many training experiments with different hyperparameters. The full development cycle from initial setup to a transferable policy usually spans 1–4 weeks.
Does sim-to-real transfer work perfectly every time?
No. The sim-to-real gap means that policies almost always need some adjustment after transfer. Common issues include unexpected motor dynamics, sensor noise, and environmental conditions the simulation didn’t capture. Nevertheless, modern techniques like domain randomization have dramatically improved transfer success rates. Most well-engineered pipelines achieve functional transfer on the first attempt, with fine-tuning needed only for peak performance.
Keep reading
Here are the latest posts from the blog.

When researchers gave top AI models classic attention tests borrowed from psychology labs, the results were genuinely surprising — and a little unsettling. Models like GPT-4…
OpenAI hit with 42-state investigation days confidential IPO filing — and the timing couldn’t be more dramatic. A coalition of 42 state attorneys general just launched a swee…

When Trump adviser David Sacks revealed the trigger discovery behind new AI safety concerns, the tech world paid very close attention. Sacks disclosed on X that Fable 5 — the…