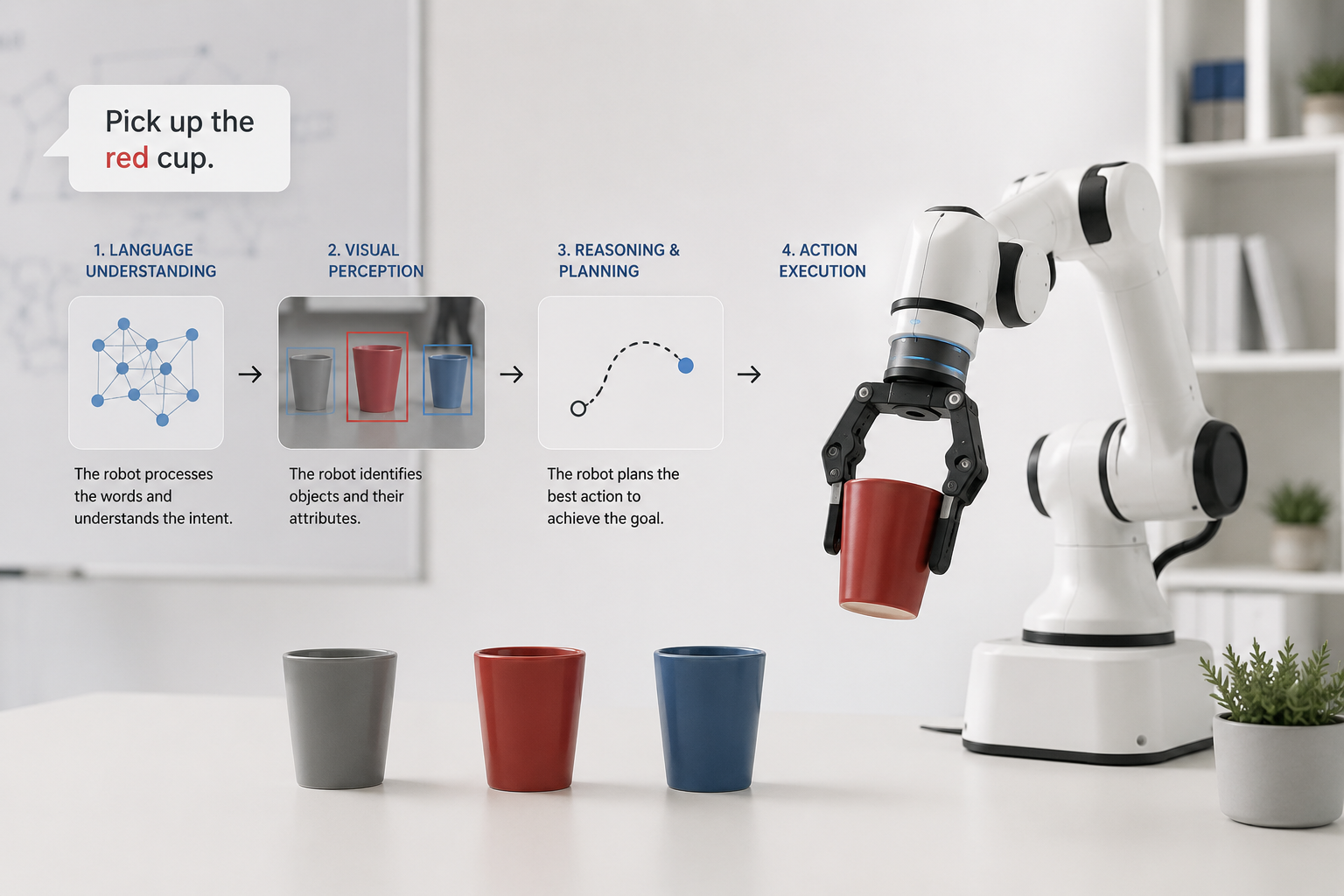
Understanding how robots understand ‘pick up the red cup’ inside their processing pipeline means peeling back some genuinely fascinating layers of AI engineering. It’s not magic — it’s a carefully orchestrated fusion of computer vision, natural language processing, and motor control, all happening in milliseconds.
Think about what “pick up the red cup” actually demands. The robot has to see the scene, identify colors, distinguish objects, parse grammar, and then move its arm with precision. Furthermore, it can’t knock everything else off the table in the process. This challenge sits at the heart of Vision-Language-Action (VLA) models — the architecture that’s finally making embodied AI practical rather than just impressive in YouTube demos.
Why “Pick Up the Red Cup” Is Harder Than It Sounds
Humans process this command effortlessly. Robots don’t.
Specifically, the instruction “pick up the red cup” contains at least four distinct computational challenges:
- Object recognition — What counts as a “cup” among dozens of objects on a cluttered surface?
- Attribute binding — Which cup is “red,” not blue or green?
- Spatial reasoning — Where exactly is the cup relative to the gripper?
- Action planning — What sequence of motor commands actually achieves “pick up”?
Each of these alone represents decades of research. Consequently, combining them into a single real-time system is what makes VLA models so remarkable. And here’s the thing: the robot can’t just “sort of” understand the command — a wrong grasp angle means a shattered cup on the floor.
How robots understand ‘pick up the red cup’ inside a VLA model differs fundamentally from traditional robotics. Old-school robots followed pre-programmed coordinates and didn’t understand language at all. Modern VLA models, however, ground language directly in visual perception and translate meaning into physical action — no hand-coded rules required.
The difficulty scales fast. “Pick up the red cup behind the blue bottle” adds relational reasoning. “Carefully pick up the fragile red cup” adds force modulation. Nevertheless, today’s VLA architectures handle these variations with increasing reliability — which still surprises me a little every time I see it working live.
Consider a concrete scenario: a robot assistant in a hospital pharmacy is asked to “hand me the red cup on the left.” The counter holds a red cup, a red pill organizer, and a translucent pink cup that looks reddish under fluorescent lighting. A traditional rule-based system would need explicit rules for every object type and lighting condition. A VLA model draws on pretrained visual semantics to reason that a cup has a cylindrical body and an open top, filters out the pill organizer by shape, and resolves the lighting ambiguity by comparing saturation values across the scene. That whole chain of reasoning happens before the arm moves a millimeter — and it has to be right, because a pharmacy is not a forgiving environment for errors.
The Architecture Behind Vision-Language-Action Models
A VLA model has three core components working together. Understanding how robots understand ‘pick up the red cup’ inside this architecture means examining each piece and, importantly, how they actually connect.
1. The vision encoder. This component processes raw camera input into meaningful representations. Most VLA models use pretrained vision transformers like SigLIP or CLIP-based encoders — models that have already learned to associate visual features with semantic concepts. Specifically, they distinguish “red cup” from “red ball” based on shape features extracted across attention layers. I’ve dug through several of these encoder architectures, and the attention visualization alone is worth exploring. A practical detail worth noting: the choice of encoder resolution matters enormously. A 224×224 input patch misses fine details like a hairline crack in a ceramic cup or a partially peeled label that changes how the gripper should approach the object. Several recent systems have moved to 448×448 or higher to capture that granularity without blowing up compute costs.
2. The language encoder. Natural language instructions get tokenized and embedded into the same representational space as visual features. This alignment is crucial — the word “red” must map to the same feature space as the visual perception of redness. Models like RT-2 from Google DeepMind achieve this through joint pretraining on internet-scale vision-language data. That’s a deceptively elegant solution to what used to be an incredibly thorny problem. One underappreciated tradeoff here is vocabulary breadth versus embedding precision: a language encoder trained on extremely diverse text handles unusual adjectives like “crimson” or “scarlet” gracefully, but may produce noisier embeddings for common manipulation verbs like “slide” or “nudge” compared to a narrower model trained specifically on robotics instructions.
3. The action decoder. This is where understanding becomes movement. The action decoder takes fused vision-language representations and outputs motor commands — joint angles, end-effector positions, or velocity targets. Additionally, it must produce those actions at high frequency, typically 5 to 50 Hz, for motion that doesn’t look like a drunk arm reaching for coffee.
The real kicker is the cross-modal attention mechanism. Because the robot processes “pick up the red cup” through cross-attention heads, visual processing focuses specifically on red-colored, cup-shaped regions. Simultaneously, the action decoder conditions its output on both the object’s location and the semantic meaning of “pick up.” Those two things happening together — that’s the breakthrough.
Here’s a simplified flow of how robots understand ‘pick up the red cup’ inside the VLA pipeline:
- Camera captures an RGB image (sometimes RGB-D for depth)
- Vision encoder extracts spatial feature maps
- Language encoder processes “pick up the red cup” into token embeddings
- Cross-attention fuses language tokens with visual features
- The fused representation highlights the red cup’s location and shape
- Action decoder generates a trajectory of motor commands
- Robot executes the grasp in real time
A useful way to build intuition for step four: imagine overlaying a heat map on the camera image after cross-attention runs. In a well-trained VLA model, the brightest regions of that heat map cluster tightly around the red cup — the model has learned to suppress attention to irrelevant objects. When that heat map spreads diffusely across the scene, it’s usually a sign the language grounding has failed and the subsequent grasp will be unreliable.
How Industry Leaders Are Building VLA Systems
Real companies are deploying these systems today. Although approaches vary, the core principle — fusing vision, language, and action — stays consistent. Here’s how major players tackle how robots understand ‘pick up the red cup’ inside their respective platforms.
Google DeepMind’s RT-2 and RT-2-X. RT-2 was a genuine breakthrough, and I don’t use that word lightly. It fine-tuned a PaLM-E vision-language model to output robot actions as text tokens — essentially treating motor commands as another language, where the robot “speaks” in coordinates. RT-2-X extended this across multiple robot embodiments, showing that VLA knowledge transfers between different hardware platforms. That cross-embodiment generalization is more impressive than it sounds. In practice, it means a policy trained primarily on a 7-DOF research arm can partially transfer to a different gripper configuration without starting from scratch — a meaningful reduction in the cost of deploying to new hardware.
Tesla’s Optimus. Tesla’s humanoid robot uses end-to-end neural networks trained heavily on real-world video data. Notably, Tesla draws on its massive fleet data pipeline — originally built for self-driving — to train visual understanding at a scale most robotics labs can’t touch. The Optimus team has shown object sorting and manipulation tasks that require exactly the kind of semantic grounding VLA models provide. Their approach emphasizes learning from demonstration at scale. One strategic advantage Tesla holds is the sheer variety of lighting conditions, surface textures, and object arrangements captured by millions of vehicle cameras — diversity that translates surprisingly well into robust visual encoders for manipulation.
Boston Dynamics and cognitive upgrades. Boston Dynamics traditionally relied on model-based control — and nobody did it better. However, they’ve been integrating foundation models into their Spot and Atlas platforms. Spot can now respond to natural language commands for navigation and inspection tasks. Pairing language understanding with their world-class locomotion is a smart architectural bet, even if it’s distinct from a pure VLA approach.
Unitree’s affordable embodied AI. Meanwhile, Chinese robotics company Unitree has been pushing VLA capabilities into more affordable humanoid platforms. Their G1 robot handles manipulation tasks guided by language instructions. Consequently, VLA technology isn’t limited to billion-dollar research labs anymore — and that accessibility shift matters more than most people realize. When a university lab in Brazil or a startup in South Korea can run VLA experiments on a $16,000 humanoid rather than a $500,000 custom platform, the pace of iteration across the global research community accelerates in ways that are hard to overstate.
| Company | VLA Approach | Key Strength | Robot Platform |
|---|---|---|---|
| Google DeepMind | RT-2 (LLM-based action tokens) | Massive pretraining data | Multiple arms |
| Tesla | End-to-end neural nets | Fleet data pipeline | Optimus humanoid |
| Boston Dynamics | Foundation model integration | Best-in-class locomotion | Spot, Atlas |
| Unitree | Language-guided manipulation | Cost-effective hardware | G1 humanoid |
| Physical Intelligence | Pi-VLA (generalist policy) | Cross-task generalization | Various platforms |
Training VLA Models: From Internet Data to Robot Actions
Understanding how robots understand ‘pick up the red cup’ inside a VLA model also means understanding how these models actually learn. The training pipeline has three distinct phases — and each one is doing heavy lifting.
Phase one: Vision-language pretraining. VLA models don’t start from scratch. They inherit knowledge from large vision-language models pretrained on billions of image-text pairs scraped from the internet. This pretraining teaches the model what cups look like, what “red” means visually, and thousands of other semantic concepts. Therefore, the robot arrives at manipulation training already knowing what objects are — which is a massive head start. A concrete illustration: because the vision-language backbone has seen thousands of images captioned “red ceramic mug on a kitchen counter,” it already associates that visual pattern with the word “cup” before a single robot demonstration is collected. The manipulation training then only needs to teach the action mapping, not the object semantics from scratch.
Phase two: Action fine-tuning. This is where the model learns to move. Researchers collect demonstration data — either from human teleoperation or scripted policies — pairing visual observations and language instructions with corresponding motor actions. Specifically, action fine-tuning teaches the mapping from “I see a red cup and I’m told to pick it up” to “move arm forward at this angle, close gripper with this force.” Fair warning: the data collection phase here is brutally labor-intensive. A single hour of high-quality teleoperation data can take three to four hours of operator time to collect, annotate, and quality-check. Teams often run multiple operators in parallel and discard episodes where the human demonstrator hesitated or corrected mid-motion, because those inconsistencies confuse the policy during training.
Phase three: Sim-to-real refinement. Many teams pretrain action policies in simulation before touching real hardware. Simulated environments like NVIDIA Isaac Sim let researchers generate millions of training episodes cheaply. However, simulated physics never perfectly matches reality. Consequently, models need additional real-world fine-tuning to bridge the gap — and that gap is stubbornly persistent. One practical technique for narrowing it is domain randomization: during simulation training, researchers randomly vary lighting color, object texture, table surface friction, and gripper mass within plausible ranges. The model never sees a single “canonical” scene, so it learns policies that are robust to the kind of variation it will encounter when it finally runs on physical hardware.
The data requirements are substantial. RT-2 trained on robot demonstration datasets containing over 130,000 episodes. Similarly, newer models like Octo and OpenVLA use the Open X-Embodiment dataset, which aggregates manipulation data from 22 different robot types. That diversity is what helps models generalize beyond their training conditions.
A critical insight about how robots understand ‘pick up the red cup’ inside VLA training: the model doesn’t memorize specific cup locations. Instead, it learns a generalizable policy. Show it a red cup it’s never seen, in a kitchen it’s never visited, and it should still succeed. That’s the power of semantic grounding through pretraining — and honestly, this surprised me when I first saw it work on genuinely novel objects.
Why Vision-Language-Action Integration Remains the Bottleneck
Despite the impressive demos, VLA models face serious limitations. This integration challenge is arguably the biggest unsolved problem in all of embodied AI right now.
Latency problems. Large VLA models can take 200+ milliseconds per inference step. For delicate manipulation, that’s too slow — a cup can slip in under 100 milliseconds. Researchers are actively working on model distillation and quantization to speed things up. Nevertheless, there’s a fundamental tension between model capability and inference speed that nobody has cleanly resolved yet. One emerging workaround is a two-tier architecture: a slower, high-capacity VLA model runs at 2–5 Hz to set high-level goals and update the scene representation, while a lightweight reactive controller runs at 50+ Hz to handle fine motor adjustments between VLA updates. It’s an inelegant solution, but it works well enough to keep cups from slipping.
Grounding failures. Sometimes the model “understands” the language but misgrounds it visually — grabbing the wrong red object, or correctly locating the red cup but miscalculating the grasp point. These failures are especially common with transparent, reflective, or partly hidden objects. Additionally, cluttered environments dramatically increase error rates. I’ve seen demos fall apart the moment someone adds a second red object to the scene. A partially occluded red cup — say, half-hidden behind a cereal box — is particularly treacherous, because the visible portion may not provide enough shape information to confirm it’s a cup rather than a bowl or a can.
Generalization gaps. A model trained in lab environments often struggles in real kitchens. Lighting changes, novel objects, and unexpected obstacles all create distribution shifts. Although pretraining on diverse internet data helps, the gap between internet images and robot-eye-view images remains significant — and it’s sneakier than it looks. A robot camera mounted at waist height sees the world from an angle that almost never appears in web-scraped training data, which means the visual encoder is constantly working slightly outside its comfort zone.
Action precision. Language is inherently imprecise. “Pick up” could mean a top grasp, side grasp, or pinch grasp. The model must infer the right strategy from context. Moreover, different objects need different force profiles — a paper cup needs gentle handling, while a ceramic mug tolerates a firmer grip. Getting that force calibration right is still more art than science. Some teams address this by adding tactile sensor data as a third modality alongside vision and language, letting the model feel when grip force is approaching a threshold that would crush the object. It helps, but it adds hardware complexity and another data modality to align during training.
Current research directions addressing these bottlenecks include:
- Diffusion-based action decoders that generate smoother, more precise trajectories
- Hierarchical VLA models that separate high-level planning from low-level control
- Active perception where the robot moves its camera to reduce visual ambiguity
- Chain-of-thought reasoning that lets the model work through steps explicitly before acting
- Tactile-augmented VLA that incorporates fingertip force and slip signals to improve grasp reliability on deformable or fragile objects
Understanding how robots understand ‘pick up the red cup’ inside these evolving architectures reveals both the promise and the gaps. We’re closer than ever. But solid real-world deployment still requires significant engineering — anyone who tells you otherwise is selling something.
Conclusion
The question of how robots understand ‘pick up the red cup’ inside a VLA model touches nearly every frontier of modern AI at once. Vision encoders parse the scene, language encoders extract meaning, and action decoders translate understanding into movement. Together, they create robots that genuinely comprehend human instructions rather than just pattern-matching against pre-programmed responses.
Companies like Google DeepMind, Tesla, Boston Dynamics, and Unitree are building real VLA systems right now — not in five years, now. The three-phase training pipeline explains why integration remains the hardest problem in embodied AI. Importantly, this technology is moving fast. What was impossible two years ago is now shown in labs worldwide, and moreover, the pace isn’t slowing down.
If you want to understand how robots understand ‘pick up the red cup’ inside their processing systems, here are actionable next steps worth taking today:
- Explore OpenVLA — an open-source VLA model you can actually experiment with right now
- Try NVIDIA Isaac Sim for building simulated manipulation environments without expensive hardware
- Read the RT-2 paper to understand the foundational architecture behind modern VLA systems
- Follow the Open X-Embodiment project for the latest cross-robot datasets
- Study transformer attention mechanisms — they’re the glue holding VLA models together
The gap between “impressive demo” and “reliable household robot” is closing. VLA models are the bridge. I’ve been watching this space for a long time — and this particular moment feels different.
FAQ
How does a robot understand “pick up the red cup” differently from a search engine?
A search engine matches keywords to documents. A robot must ground those words in physical reality. Specifically, how robots understand ‘pick up the red cup’ inside a VLA model involves mapping language to visual features and then to motor commands — the robot doesn’t retrieve information, it acts on it. Therefore, the understanding must be spatial, temporal, and physical, not just semantic. That’s a fundamentally different computational problem, and conflating the two is a common mistake even among people who work in AI.
What happens when a VLA model encounters an object it has never seen before?
VLA models draw on pretrained vision-language knowledge from billions of internet images. Consequently, they can often recognize novel objects through visual similarity — if the model has seen thousands of cups during pretraining, it can likely identify an unusual cup design it’s never encountered before. However, completely alien objects may cause grounding failures. Additionally, novel objects with unusual physical properties — like extreme fragility or unexpected weight distribution — pose real challenges for action planning. A practical mitigation some teams use is to prompt the model with a brief descriptive sentence about the novel object before issuing the manipulation command, giving the language encoder additional context to anchor its visual search.
Keep reading
Here are the latest posts from the blog.

The phrase export controls intelligence why governments treating AI like military hardware would’ve sounded absurd five years ago. Not anymore. Today, advanced AI models sit…

The question of voting rights vs capital in DeepSeek’s unusual funding structure isn’t just a corporate finance curiosity. It’s a window into how the world’s most powerful AI…
Sim real transfer how robots learn walk is one of the most important breakthroughs in modern robotics — and honestly, it’s one of those ideas that sounds obvious in hindsight…